Sandbox
Double pendulum
Lagrangian dynamics
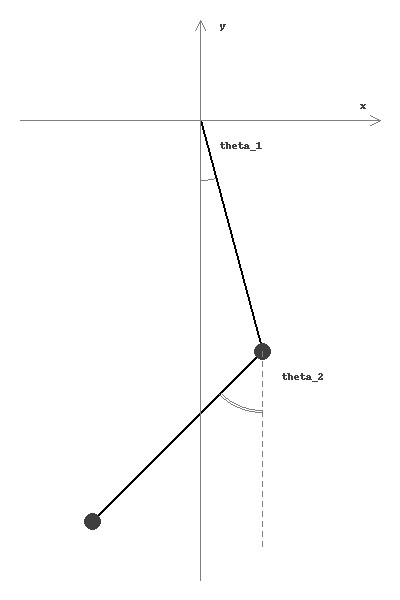
Notation
\[\begin{matrix} m_i & - & \text{mass of the pendulum part} \\ \{x_i, y_i\} & - & \text{cartesian coordinates of the center of mass} \\ \mathrm{g} & - & \text{free acceleration} \end{matrix}\]Lagrange’s function $\mathcal{L}(\theta_i, \dot{\theta_i})$ is expressed via kinetic and potential energy $\,T - U$
\[\begin{align} T & = & \dfrac{m_1}{2} \Big( \dot{x_1}^2 + \dot{y_1}^2 \Big) + \dfrac{m_2}{2} \Big( \dot{x_2}^2 + \dot{y_2}^2 \Big) \\ U & = & m_1\mathrm{g} y_1 + m_2\mathrm{g} y_2 \end{align}\]Kinematical relations
Kinematical relations are needed to represent energy values via the generalized coordinates
\[\begin{align} x_1 & = & l_1\sin\theta_1 \\ y_1 & = & - l_1\cos\theta_1 \\ x_2 & = & x_1 + l_2\sin\theta_2 \\ y_2 & = & y_1 -l_2\cos\theta_2 \\ \end{align}\]Symmetric double mathematical pendulum
Symmetry conditions (dimensionless)
\[\mathrm{g} = 1 \qquad m_1 = m_2 = 1 \qquad l_1 = l_2 = 1\]Lagrangian
\[\mathcal{L} = \dot{\theta_1}^2 + \dfrac{1}{2}\dot{\theta_2}^2 + \cos(\theta_1 - \theta_2)\dot{\theta_1}\dot{\theta_2} + 2\cos\theta_1 + \cos\theta_2\]Equations of motion
Equations of motion in generalized coordinates
\[\Bigg( \dfrac{\mathrm{d}}{\mathrm{d}t} \dfrac{\partial}{\partial\dot{\theta_i}} - \dfrac{\partial}{\partial\theta_i} \Bigg) \mathcal{L}(\dot{\theta_i}, \theta_i) = 0 \qquad i = \{1, 2\}\]System of coupled differential equations
\[\begin{cases} & 2\ddot{\theta_1} + \cos(\theta_1 - \theta_2)\ddot{\theta_2} + \sin(\theta_1 - \theta_2)\dot{\theta_2}^2 + 2\sin\theta_1 & = & 0 \\ & \ddot{\theta_2} + \cos(\theta_1 - \theta_2)\ddot{\theta_1} - \sin(\theta_1 - \theta_2)\dot{\theta_1}^2 + \sin\theta_2 & = & 0 \end{cases}\]Solving for $\ddot{\theta_i}$ yields
\[\begin{cases} & \ddot{\theta_1} & = & \dfrac{ \sin\theta_2\cos(\theta_1 - \theta_2) - 2\sin\theta_1 - \sin(\theta_1 - \theta_2) \Big[ \dot{\theta_2}^2 + \cos(\theta_1 - \theta_2)\dot{\theta_1}^2 \Big] }{2 - \cos^2(\theta_1 - \theta_2)} & \\ & \ddot{\theta_2} & = & \dfrac{ 2\sin\theta_1\cos(\theta_1 - \theta_2) - 2\sin\theta_2 + \sin(\theta_1 - \theta_2) \Big[ 2\dot{\theta_1}^2 + \cos(\theta_1 - \theta_2)\dot{\theta_2}^2 \Big] }{2 - \cos^2(\theta_1 - \theta_2)} \end{cases}\]Numerical solution
For initial conditions
\[\theta_1=0, \quad \theta_2=\dfrac{\pi}{2}, \quad \dot{\theta_1}=0, \quad \dot{\theta_2}=0\]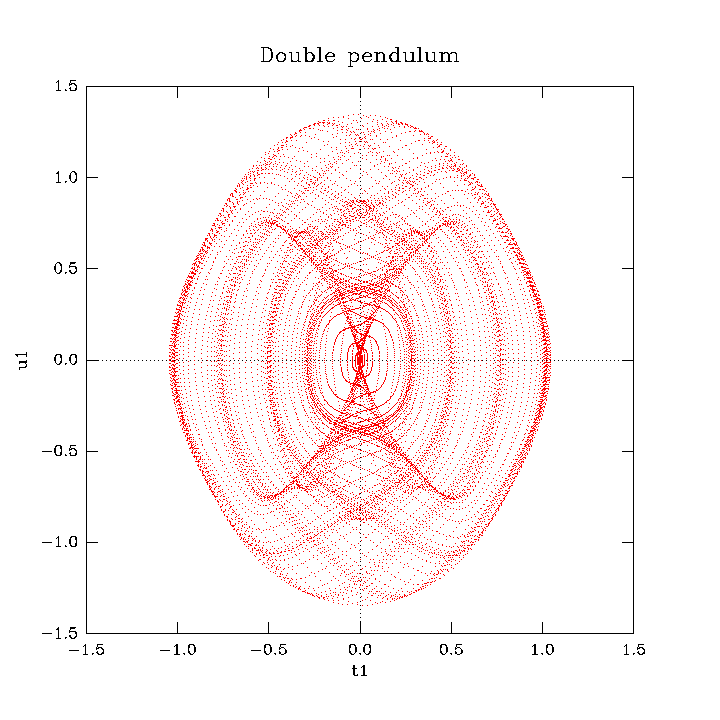
plotutils ode
ODE description
# Double pendulum
t1' = u1
t2' = u2
u1' = (sin(t2)*cos(t1 - t2) - 2*sin(t1) - sin(t1 - t2)*(u2^2 + cos(t1 - t2)*u1^2)) / (2 - cos(t1 - t2)^2)
u2' = (2*sin(t1)*cos(t1 - t2) - 2*sin(t2) + sin(t1 - t2)*(2*u1^2 + cos(t1 - t2)*u2^2)) / (2 - cos(t1 - t2)^2)
t1 = 0
t2 = 3*atan(1/sqrt(3))
u1 = 0
u2 = 0
E0 = u1^2 + u2^2/2 + u1*u2*cos(t1 - t2) + 3 - 2*cos(t1) - cos(t2)
print t1, u1, t2, u2, E0
step 0, 2*192, 0.02
plotutils graph
graph -T png \
--bitmap-size 720x720 \
--font-size 0.03 \
--width-of-plot 0.76 \
--right-shift 0.12 \
--height-of-plot 0.76 \
--upward-shift 0.12 \
--title-font-size 0.04 \
-L "t=0..384" \
-C -m -1 \
-S 1 \
-X "\*H_1" \
-Y "d \*H_1 / d t"
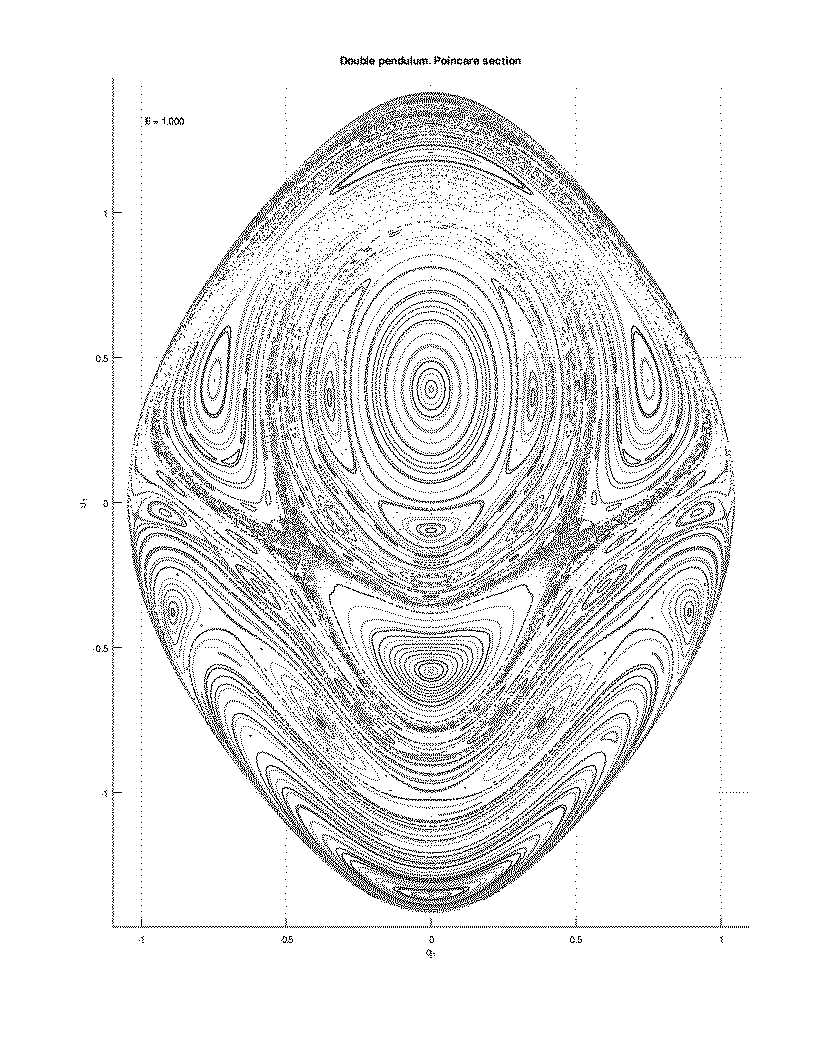
Poincare section
Section $\theta_2 = 0, \quad \mathcal{E}_0 = 1.0$
Small oscillations
Linearized equations of motion for small amplitudes
\[\mathtt{M}\cdot\ddot{\vec{\Theta}} + \mathtt{K}\cdot\vec{\Theta} = 0\]where
\[\mathtt{M} = \begin{pmatrix} 2 & 1 \\ 1 & 1 \end{pmatrix} \qquad \mathtt{K} = \begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix}\]Normal frequencies
\[\omega_{1,2}^2 = 2 \pm \sqrt{2} \qquad \dfrac{\omega_2}{\omega_1} = 1 + \sqrt{2}\]Hamiltonian dynamics
Momentum
\[\begin{align} p_1 = \dfrac{\partial \mathcal{L}}{\partial \dot{\theta_1}} & = & 2\dot{\theta_1} + \cos(\theta_1 - \theta_2)\dot{\theta_2} \\ p_2 = \dfrac{\partial \mathcal{L}}{\partial \dot{\theta_2}} & = & \dot{\theta_2} + \cos(\theta_1 - \theta_2)\dot{\theta_1} \end{align}\]Hamiltonian
\[\mathcal{H}(p_i, \theta_i) = \sum_{i=1}^2 p_i \dot{\theta_i} - \mathcal{L}\]For symmetric double mathematical pendulum
\[\mathcal{H} = \dfrac{1}{2} \dfrac{p_1^2 + 2p_2^2 - 2\cos(\theta_1 - \theta_2) p_1 p_2}{2 - \cos^2(\theta_1 - \theta_2)} + 3 - 2\cos\theta_1 - \cos\theta_2\]Equations of motion
Equations of motion in phase space
\[\dot{\theta_i} = \dfrac{\partial\mathcal{H}}{\partial p_i} \qquad \dot{p_i} = -\dfrac{\partial\mathcal{H}}{\partial \theta_i} \qquad i = \{1,2\}\] \[\begin{cases} \dot{\theta_1} & = & \dfrac{p_1 - \cos(\theta_1 - \theta_2) p_2}{2 - \cos^2(\theta_1 - \theta_2)} \\ \dot{\theta_2} & = & \dfrac{2p_2 + \cos(\theta_1 - \theta_2) p_1}{2 - \cos^2(\theta_1 - \theta_2)} \\ \dot{p_1} & = & -2\sin\theta_1 - \mathcal{W}(p_1, p_2, \theta_1, \theta_2) \\ \dot{p_2} & = & -\sin\theta_2 + \mathcal{W}(p_1, p_2, \theta_1, \theta_2) \end{cases}\] \[\mathcal{W}(p_1, p_2, \theta_1, \theta_2) = \dfrac{\sin(\theta_1 - \theta_2)}{2 - \cos^2(\theta_1 - \theta_2)} \Big( p_1 p_2 - 2\cos(\theta_1 - \theta_2)(\mathcal{E}_0 - 3 + 2\cos\theta_1 + \cos\theta_2) \Big)\]where $\mathcal{E}_0 = \mathcal{H}(t = 0)$